从STM32到AI:大圣II智能小车全链路硬件架构解析

大圣II智能小车打通STM32到ROS/AI的全链路学习架构解析
本文系统梳理了大圣II智能小车的硬件架构设计,该产品通过基础版(STM32底层驱动)和专业版(激光雷达+AI视觉+ROS)的分层设计,构建了从嵌入式开发到AI机器人应用的渐进式学习路径。硬件采用核心板、大底板、扩展板三层模块化结构,涵盖电机驱动、传感器采集、通信接口及电源管理等完整系统,帮助学习者建立嵌入式+AI全栈开发的宏观认知。
引言:为什么需要全链路学习?
在嵌入式开发和AI机器人学习的道路上,很多初学者面临一个共同困惑:学了单片机之后,如何衔接到上层的AI应用?B站UP主"大圣"推出的大圣II智能小车课程,试图用一套硬件产品打通从STM32底层驱动到ROS机器人操作系统、再到AI视觉导航的完整学习链路。本文将基于该课程的硬件讲解内容,系统梳理大圣II的架构设计思路,帮助读者建立对嵌入式+AI全栈开发的宏观认知。

产品定位:基础版与专业版的分层设计
大圣II智能小车分为两个版本,这种分层设计本身就体现了嵌入式到AI学习的渐进式路径。
基础版:让车"动起来"
基础版的核心是一块STM32F103VGT6主控板,没有激光雷达和上位机。它承载的是所有底层外设驱动的学习任务——从最基础的GPIO点灯、舵机控制,到I2C传感器读取、PWM电机驱动等。对于零基础学习者来说,这就是入门阶段需要扎实掌握的内容。
专业版:让车"看懂世界"
专业版在基础版之上集成了激光雷达、摄像头,并搭载了地瓜机器人(旭日派)开发板。后续还计划适配树莓派、英伟达Jetson Nano等方案。专业版的定位是实现自主决策、AI视觉和自主导航功能,对应的是ROS应用层的学习。
这种"基础版负责感知执行,专业版负责决策智能"的分层,恰好映射了机器人系统中经典的感知-决策-执行架构,设计思路值得借鉴。

三层模块化硬件架构详解
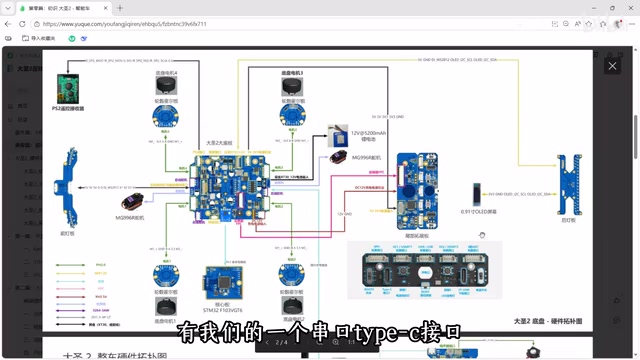
大圣II的底盘硬件采用了三层模块化结构:大底板、核心板和尾部扩展板。这种设计不仅便于维修更换,也为后续升级主控或扩展功能提供了灵活性。
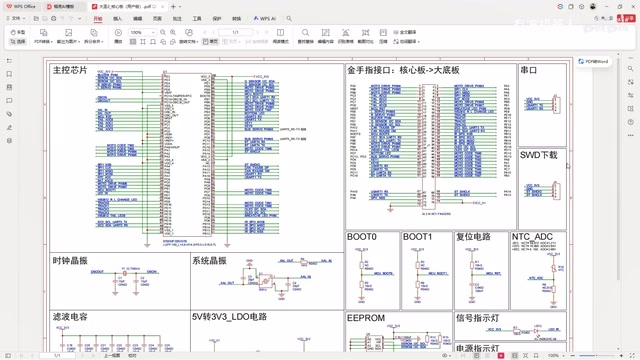
核心板:系统的"大脑"
核心板搭载STM32F103VGT6主控芯片,拥有丰富的定时器资源和IO口。板上还集成了:
- SPI Flash芯片:用于数据存储
- NTC热敏电阻:用于温度检测
核心板通过金手指插槽与大底板连接,这种设计意味着如果未来想升级到更高性能的主控(比如STM32F4系列),只需更换核心板即可。
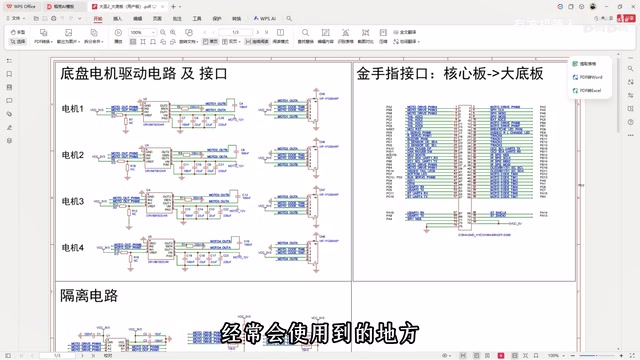
大底板:硬件的"骨架"
大底板是整个系统的硬件骨架,布满了各种功能接口:
- 电机接口:连接底盘4个驱动电机(电机1-4)
- 舵机接口:连接车头和车尾的转向舵机(MG996R),支持双转向结构
- 传感器接口:包括MPU6050(姿态传感器)、循迹模块等
- 通信接口:蓝牙模块、PS2遥控接收器、上位机通信接口
- 扩展接口:WS2812 RGB灯带、总线舵机预留接口、FPC连接器等
值得注意的是,大底板上设计了隔离电路,防止电机堵转时电流倒灌烧毁开发板——这是实际工程中非常重要的保护措施,初学者容易忽略。
尾部扩展板:调试与交互的窗口
尾部扩展板集中了开发调试和用户交互相关的功能:
- 串口Type-C接口:用于串口通信和调试
- ST-Link下载接口:用于程序烧录
- 扩展接口排:提供SPI、I2C、UART、GPIO、USB、ADC等外设接口,方便DIY扩展
- BOOT0拨动开关:用于切换启动模式(如图形化编程学习时需要使用)
- 用户按键和LED:包括自定义侧尾灯,下一节课要点亮的车尾灯控制电路就在这里
电源系统与原理图要点
电源拓扑
大圣II的电源系统采用逐级降压方案:
- 12V充电电路 → 总开关电路
- 12V转5V:为舵机、传感器等供电
- 5V转3.3V:为STM32主控及数字外设供电
其中,电池电压采集电路是后续课程中会重点使用的模块,通过ADC采集分压后的电池电压,实现低电量报警等功能。
核心板原理图关键点
从核心板原理图可以看到,STM32F103VGT6的引脚通过金手指接口引出到大底板。课程中强调需要重点关注两个电路:
- NTC热敏电阻电路:涉及ADC采集和温度换算
- SPI Flash电路:涉及SPI通信协议的实际应用
从基础版到ROS:学习路径的无缝衔接
大圣II专业版的ROS硬件架构同样值得关注。上位机(旭日派/树莓派等)通过转接板与大底板通信,转接板还连接着独立的供电模块,为激光雷达、扬声器等高功耗设备供电。
这种设计构建了一个完整的ROS硬件架构:
- 底层:STM32负责电机控制、传感器采集等实时任务
- 上层:Linux开发板运行ROS,负责SLAM建图、路径规划、AI视觉等计算密集型任务
- 通信:上下位机通过串口/USB进行数据交换
这正是当前主流机器人系统的典型架构,学习者可以在同一套硬件上完成从裸机开发到ROS应用的全链路实践。
总结与思考
大圣II的硬件设计有几个值得学习的亮点:
- 模块化分层:核心板、大底板、扩展板各司其职,坏了换一块,升级换一块
- 渐进式学习路径:基础版打底层基础,专业版进阶AI应用,避免了"一步到位"带来的学习断层
- 工程化细节:隔离电路、电压采集、BOOT0切换等设计体现了实际产品开发的思维
对于想要从单片机入门逐步走向AI机器人开发的学习者来说,理解这样一套完整的硬件架构,比单纯学习某个外设驱动更有价值。当你在代码中配置某个GPIO引脚时,能够清楚地知道它连接着哪个传感器、处于系统的哪个层级——这种全局视角,正是从"会写代码"到"会做系统"的关键一步。
相关推荐
 教程攻略
教程攻略Cursor+Codex双IDE协同:开源项目二开实战方法论
基于实战经验总结的开源项目二次开发完整方法论,详解Cursor+Codex双IDE协同工作流,涵盖二开七环节、MVP验证、AI读源码技巧,帮助开发者三天跑通项目、两周完成业务集成。
 教程攻略
教程攻略Cursor多Agent实战:50分钟搭建Next.js全栈博客
使用Cursor IDE多Agent协作模式,50分钟内从零搭建全栈博客。涵盖Next.js、Clerk认证、Supabase数据库集成,详解4个AI Agent分阶段开发流程与关键避坑经验。
 教程攻略
教程攻略从零搭建AI软件工厂:Cursor工程师的多Agent协作实战经验
Cursor工程师Eric分享AI软件工厂构建实战:从自动化六层级、护栏设计、并行Agent管理到规模化扩展,详解如何用多Agent协作实现7×24小时高效软件开发。