Decoupled DiLoCo详解:让大规模GPU训练不再怕宕机

Decoupled DiLoCo通过解耦训练单元实现大规模AI训练的优雅容错。
Decoupled DiLoCo是一种分布式AI训练方法,通过解耦训练单元间的依赖关系,实现低频同步和弹性容错。当N个训练单元中某个发生故障时,其余单元可继续训练,将故障影响从全局停机降级为局部性能下降。该方法在万卡级集群中可显著减少因硬件故障导致的经济和时间损失,同时天然适合跨数据中心的分布式训练场景。
引言
在大规模AI模型训练中,硬件故障几乎是不可避免的。当数千块GPU协同工作时,任何一个节点的失败都可能导致整个训练任务中断,造成巨大的时间和资源浪费。近日,一位深度参与Decoupled DiLoCo训练系统开发的研究者在社交媒体上分享了这一新方法的核心理念——它能够在大规模训练中优雅地处理故障,让训练过程不再因单点失败而全面停摆。
什么是Decoupled DiLoCo?
DiLoCo的基本概念
DiLoCo(Distributed Low-Communication)是一种分布式训练方法,核心思想是减少训练节点之间的通信频率。传统的数据并行训练要求每个训练步骤后都进行梯度同步,这对网络带宽和延迟提出了极高的要求。具体而言,传统数据并行训练(如使用AllReduce通信原语)要求每个mini-batch结束后,所有GPU将各自计算的梯度进行全局聚合,确保每个节点上的模型参数保持完全一致。在千卡规模下,这意味着每秒可能需要传输数十GB的梯度数据,对高速互联网络(如InfiniBand或NVLink)形成极大压力。
DiLoCo则允许各个训练单元在本地独立进行多步训练,仅在较长的间隔后才进行一次全局同步,从而大幅降低通信开销。DiLoCo的灵感部分来源于联邦学习(Federated Learning)中的本地SGD思想,由DeepMind团队在2023年提出,其核心是让每个worker group独立执行H步内部优化(inner optimization),然后仅将模型参数的伪梯度(pseudo-gradient)通过外部优化器(outer optimizer,通常使用Nesterov动量)进行一次全局同步。实验表明,H可以设置为数百步而不显著影响最终模型质量,通信量因此降低了数百倍。
"Decoupled"解耦设计的关键突破
Decoupled DiLoCo在原有DiLoCo的基础上进一步解耦了训练单元之间的依赖关系。这种解耦带来了一个极具实用价值的容错特性:当N个训练单元中的某一个发生故障时,剩余的(N-1)/N个单元可以继续正常推进训练,而不需要等待故障节点恢复或重启整个训练任务。
传统分布式训练中的全局同步操作本质上是一个同步屏障(Barrier Synchronization):所有参与者必须同时到达同步点,任何一个落后者都会拖慢整体进度,这就是所谓的"掉队者问题"(Straggler Problem)。而Decoupled DiLoCo的解耦设计打破了这一刚性约束。具体而言,它允许外部同步步骤在部分worker group缺席的情况下仍然执行——缺席节点的伪梯度贡献被跳过,剩余节点的伪梯度仍然可以被外部优化器有效聚合。这与完全异步SGD不同,后者虽然也不要求同步,但容易因梯度过时(staleness)导致训练不稳定。Decoupled DiLoCo在同步与异步之间找到了一个实用的平衡点:低频率的半同步更新既保证了收敛性,又提供了对节点故障的天然免疫力。
举个直观的例子:如果你有100个训练单元,其中1个出现硬件故障,其余99个可以无缝继续工作。训练效率的损失仅为1%,而非传统方法中的100%停机。
为什么分布式训练的容错能力如此重要?
万卡集群的现实挑战
当前前沿AI模型的训练规模已经达到了数千甚至数万块GPU的量级。在这样的规模下,硬件故障不是"是否会发生"的问题,而是"多久发生一次"的问题。业界报告显示,在万卡级别的GPU训练集群中,每天都可能出现多次节点故障。
这一数据并非夸张。Meta在其OPT-175B训练日志中披露,175天的训练过程中经历了超过100次硬件相关的中断事件,平均每1-2天就会出现一次需要人工干预的故障。Google在训练PaLM模型时也报告了类似的挑战。当前业界应对故障的标准做法是定期保存检查点(Checkpoint),故障发生后从最近的检查点恢复训练。然而,对于参数量达数千亿的模型,单次检查点的写入可能需要数十分钟,且恢复后需要重新加载模型、重建数据流水线、重新预热学习率调度器等,整个恢复过程可能耗时30分钟到数小时不等。更关键的是,从检查点到故障发生之间的所有计算都被浪费了。
传统的分布式训练方法(如标准的数据并行或模型并行)通常要求所有节点保持严格同步。一旦某个节点失败,整个训练任务要么完全停止,要么需要从最近的检查点重新启动,这可能意味着数小时的训练进度付之东流。Decoupled DiLoCo从根本上改变了这一范式——故障节点的丢失不会导致其他节点的计算被浪费。
停机成本:一笔不容忽视的经济账
以当前GPU集群的租赁成本计算,大规模训练每小时的费用可能高达数万美元。每一次因故障导致的停机和回滚,都意味着真金白银的损失。Decoupled DiLoCo通过允许部分节点独立继续训练,将故障的影响从"全局停机"降级为"局部性能下降",这在经济效益上的提升是显著的。
Decoupled DiLoCo的技术架构解析
松耦合的训练单元设计
Decoupled DiLoCo的每个训练单元(worker group)在本地维护一份完整的模型副本,并独立执行多个训练步骤。这种设计天然地减少了单元之间的依赖性。当某个单元离线时,其他单元并不需要等待它的梯度贡献,因为全局同步本身就是低频率的、可容忍部分缺失的。
深入来看,每个worker group内部可以使用标准的数据并行或模型并行策略进行常规训练(内部优化器通常为AdamW)。经过H步本地训练后,每个worker group计算其当前模型参数与上次全局同步时参数之间的差值,这个差值被称为伪梯度(pseudo-gradient),它概括了该worker group在H步训练中学到的所有信息。外部优化器(outer optimizer)收集所有可用worker group的伪梯度,进行聚合(通常是简单平均),然后使用带动量的优化算法(如Nesterov Momentum SGD)更新全局模型参数。由于伪梯度本身是H步训练的累积结果,单个worker group的缺失对聚合结果的影响远小于传统逐步同步中单个梯度的缺失,这就是容错能力的数学基础。
优雅降级而非硬性中断
"优雅处理故障"(graceful handling of failures)是该系统设计的核心哲学。系统不追求零故障的理想状态,而是接受故障作为常态,并在架构层面确保故障的影响被最小化和局部化。
这种设计理念深深植根于分布式系统领域数十年的工程智慧。早在2003年,Google发表的Google File System论文就确立了"故障是常态而非异常"的设计原则,这一理念后来贯穿了MapReduce、Spanner等一系列系统的设计。在可靠性工程中,这种思想被称为"Design for Failure"。此外,CAP定理指出分布式系统无法同时满足一致性(Consistency)、可用性(Availability)和分区容错性(Partition Tolerance),Decoupled DiLoCo本质上选择了在一定程度上放松一致性(允许各worker group暂时持有不同的模型参数)来换取更高的可用性和分区容错性。这种权衡在Web服务领域已被广泛接受,但在要求数值精确性的深度学习训练中引入这种思想,需要严谨的理论分析来保证最终模型质量不受显著影响。
Decoupled DiLoCo对AI训练行业的潜在影响
降低大规模训练的硬件门槛
Decoupled DiLoCo的容错特性不仅对拥有顶级硬件的大型实验室有价值,对于使用异构或不太可靠硬件的中小型团队同样意义重大。它使得在不那么"完美"的基础设施上进行大规模训练成为可能,从而有望降低前沿AI研究的准入门槛。
开启跨数据中心训练的新可能
由于Decoupled DiLoCo本身就是为低通信频率设计的,它天然适合跨数据中心甚至跨地理区域的分布式训练场景。各个训练单元可以部署在不同的数据中心,通过广域网进行低频同步,这为算力资源的灵活调度提供了新的可能。
跨数据中心训练面临的核心挑战是网络条件的根本性差异:数据中心内部的GPU互联带宽通常在100-400 Gbps量级(通过InfiniBand HDR/NDR或NVSwitch),而数据中心之间的广域网带宽可能仅有1-10 Gbps,且延迟从微秒级跃升至毫秒甚至数十毫秒级。这使得传统的AllReduce同步在跨数据中心场景下几乎不可行。Google的相关研究(如2024年发表的DiPaCo论文)已经验证了DiLoCo系列方法在模拟跨数据中心场景下的有效性。此外,开源社区的Prime Intellect项目也在探索利用类似思想实现全球分布式的去中心化训练。Decoupled DiLoCo的低通信需求(仅需每隔数百步传输一次模型大小的数据)使其成为目前最有希望突破数据中心物理边界的训练范式之一。
总结与展望
Decoupled DiLoCo代表了大规模AI训练基础设施演进的一个重要方向:从追求完美同步转向拥抱弹性容错。随着训练规模的持续增长,这类能够优雅处理故障、最大化硬件利用率的分布式训练方法,将成为支撑下一代AI模型开发的关键技术。
值得关注的是,这项工作目前仍在积极开发和优化中,未来在收敛性保证、最优同步策略以及与其他并行方法的结合等方面,都有广阔的研究空间。
核心要点
- Decoupled DiLoCo允许在N个训练单元中某个失败时,其余(N-1)/N个单元继续正常训练,实现优雅容错
- 该方法通过降低训练单元间的通信频率和依赖性,将故障影响从全局停机降级为局部性能下降
- 在万卡级训练集群中硬件故障几乎每天发生,容错能力可显著减少经济损失和时间浪费
- 低通信频率的设计使其天然适合跨数据中心的分布式训练场景
- 这种弹性容错的训练范式有望降低大规模AI训练的基础设施门槛
相关推荐
 深度解读
深度解读OpenClaw开源小龙虾AI Agent运作原理深度解析
深度解析OpenClaw(开源小龙虾)AI Agent的底层运作原理,涵盖System Prompt、工具调用、SubAgent分身、Skill系统、记忆机制与Context Engineering等核心概念,帮你彻底理解AI Agent与普通语言模型的本质区别。
 深度解读
深度解读Transformer本质解析:一个被拆解的文字接龙函数
用文字接龙的视角理解Transformer本质。将复杂的语言生成任务拆解为Embedding、Transformer Block、概率输出三大模块,帮助深度学习初学者快速建立直觉。
 深度解读
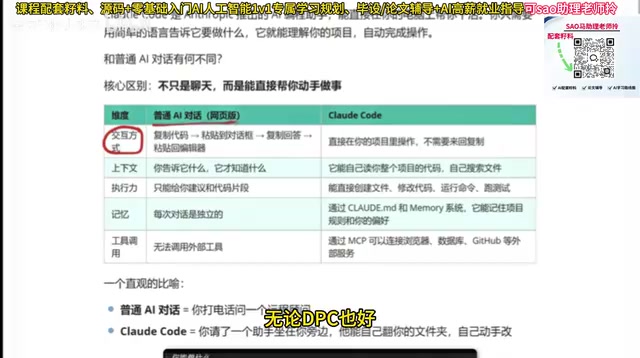
深度解读Claude Code与普通AI对话的五大核心差异
详细对比Claude Code与普通AI对话工具在交互方式、上下文理解、执行力、记忆能力和工具调用五个维度的核心差异,帮你理解AI编程助手的真正价值。