OpenAI Codex /goal 功能深度解析:AI Agent 持续工作直到目标达成的新范式

OpenAI Codex /goal 功能深度解析:AI Agent 持续工作直到目标达成的新范式
当AI开始自己管理进度时,人类最大的危机不是失业,而是发现自己根本不知道自己要什么。OpenAI 最近为 Codex CLI 新增了一个 /goal 命令,看起来只是一个小功能,但它背后代表的方向——让 AI Agent 设定目标后持续跑,不达目的不罢休——可能比大多数重大版本更新都更有意义。
这篇文章会从功能概述、技术实现、源码架构到深层范式转变,把 Codex /goal 这件事彻底拆开聊透。
过程不重要了,目标才重要
/goal 的核心逻辑很简单:你给 Codex 设定一个目标,它就围绕这个目标持续工作——写代码、跑测试、检查结果,一轮没搞定就自动开下一轮,跨多轮不丢上下文。
「过程不重要,目标才重要」——这句话听起来像管理学鸡汤,但放在 AI Agent 的语境下,它是一个残酷的事实陈述。过去程序员的价值恰恰在于「过程」:你懂得怎么拆解问题、怎么调试、怎么在迷宫里找到出路。现在 OpenAI 告诉你,这些都是可以被循环碾压的中间态。
/goal 的本质不是一个新命令,而是一份宣言:人类的角色正在从「执行者」退化为「许愿者」。问题是,许愿也是一种能力,而大多数人连愿望都说不清楚。
Ralph Loop:一个「蠢但管用」的暴力循环
在 Codex 官方推出 /goal 之前,社区里已经有人在玩类似的东西了,叫 Ralph Loop。
这个名字来自《辛普森一家》里智商堪忧的角色 Ralph Wiggum,由开发者 Jeffrey Huntley 命名。用一个蠢萌角色来命名一个暴力循环模式,这种自嘲式命名恰恰揭示了社区对这种方法的态度:它蠢,但它管用。
Ralph Loop 的工作方式很粗暴:
- 设定一个目标
- 让 Agent 跑一轮
- 一轮结束后,Agent 从头开始一个全新的上下文窗口
- 靠 Git 记录和进度文件保持记忆
- 失败就重来,直到目标达成
说白了就是「换班交书面交接」——每轮结束写个交接文档,下一轮的 Agent 读完文档从头干起。讽刺的是,人类组织花了几十年优化的知识管理和交接流程,AI 社区用一个周末的 hack 就复刻了。
更讽刺的是,这种「笨办法」之所以有效,是因为大模型的推理成本已经低到可以容忍大量重复计算。暴力美学的前提是算力廉价,而这个前提正在加速成立。
Codex /goal vs Ralph Loop:马拉松选手 vs 接力赛
Codex /goal 和 Ralph Loop 虽然目标一致,但实现思路完全不同。
Ralph Loop 像接力赛——每一棒换新人,前一棒的记忆靠交接文档传递。天然具备容错能力,任何一轮崩溃都不影响下一轮。
Codex /goal 像马拉松——同一个选手从头跑到尾,累了可以暂停但不换人。目标在同一个会话里跨轮次保持活跃,不需要从头启动新上下文。
但这背后隐藏着一个更深层的工程权衡:上下文连续性 vs 鲁棒性。马拉松模式效率高,但一旦中途出现幻觉或逻辑偏移,错误会在同一上下文中累积放大。这就像单线程程序和多进程程序的区别:前者效率高但一崩全崩,后者笨重但隔离性好。
OpenAI 选择了效率优先,说明他们对自家模型的上下文稳定性有信心——或者说,他们在赌。
怎么用:命令详解与实用技巧
基本用法
首先你需要 Codex CLI 0.128.0 以上版本,并在配置文件中开启 goals 功能。
然后直接输入:
/goal 你的目标描述
Codex 就会围绕这个目标持续工作:写代码、跑测试、检查结果,一轮未达成自动开启下一轮。
辅助命令
| 命令 | 作用 |
|---|---|
/goal pause | 暂停当前目标 |
/goal resume | 恢复已暂停的目标 |
/goal clear | 清除目标 |
Ctrl+C | 中断时目标自动暂停,下次恢复会话时自动继续 |
长目标怎么办?
目标描述太长的话,可以写进一个 Markdown 文件,然后用:
/goal follow instructions.md
这样做还有一个好处——避免上下文压缩时丢失细节。这个 workaround 其实暴露了当前大模型的硬伤:上下文窗口再大,压缩算法仍然是有损的。用户不得不用文件系统来弥补模型记忆的缺陷,这种「人类给 AI 打补丁」的场景,本身就挺黑色幽默的。
/side 命令:不打断主线的临时分支
/side 命令是这套系统中最被低估的设计。它允许你在不打断主线目标的情况下,临时开一个分支会话问问题,按 ESC 回到主线,分支会话直接丢弃。
它本质上承认了一个事实:即使在目标导向的工作流中,人类仍然需要「插嘴」的权利。这不是技术问题,是心理问题——人类无法完全放手。
三层防护机制:防止 Agent 空转和自欺欺人
让 Agent 自主循环工作,最怕的就是它空转或者自欺欺人地宣布「搞定了」。Codex 为此设计了三层防护:
第一层:零工具调用检测
如果一轮续跑中 Agent 没有调用任何工具——没写代码、没跑命令、没读文件——系统就判定它卡住了,自动停止循环。简单粗暴但有效。
第二层:预算控制
每个目标可以设置 token 预算和时间上限。超出预算时,系统会注入提示,要求模型总结当前进展并给出下一步建议,而不是继续盲目烧 token。
第三层:完成审计协议
这是最精妙的一层。每次续跑开始时,系统会注入一段隐藏指令,要求模型:
- 将目标拆解为可交付物
- 建立检查清单
- 将需求映射到实际证据(文件、输出、测试结果)
- 不能仅凭测试通过就认为目标完成
这里针对的是 Agent 循环中最隐蔽的失败模式——「代理证据接受」。说白了就是模型会自欺欺人:测试通过了就认为功能完成,文件生成了就认为目标达成。这和人类程序员的「works on my machine」心态如出一辙。
区别在于,人类有同事 code review 来纠偏,而 Agent 只有冰冷的检查清单。更深层的问题是:谁来验证检查清单本身是否完备?这是一个无限回归的信任问题,目前的解决方案本质上是「用规则约束概率」,而规则永远跑不赢概率的创造力。
源码拆解:1570 行 Rust 代码的三层架构
/goal 的核心逻辑在 goal_state.rs 文件中,大约 1570 行 Rust 代码。代码量不大,但设计决策处处透着讲究。
持久化层
目标状态存在 SQLite 数据库中,进程重启、线程恢复都不会丢失。目标有四种状态:
- 进行中
- 暂停
- 预算耗尽
- 完成
工具层
暴露三个工具给模型:读取当前目标、创建目标、更新目标状态。
这里有一个关键的权限设计:模型只能将目标标记为「完成」,不能暂停或恢复。暂停和恢复只有用户能做。这是一个深思熟虑的控制论选择——给 Agent 完成任务的自主权,但保留人类「叫停」的最终权力。防止模型偷懒,也防止模型越权。
续跑层
每轮结束后执行一个六步检查链:
- 目标功能是否开启?
- 是否有活跃目标?
- 是否有其他轮次在跑?
- 是否有待处理的消息队列?
- 续跑是否被抑制?
- 是否在 Plan 模式?
全部通过后,才注入目标描述、预算使用情况和完成审计协议,开启下一轮。
Token 预算的精妙设计
预算计算只统计非缓存的输入 token 加输出 token,缓存命中部分不算入预算。这意味着预算追踪的是「新增工作量」,复读已有上下文不收费。
这个设计本质上是用经济学手段引导模型行为——激励模型复用已有上下文而非重复生成。比任何 prompt engineering 都优雅。
当前局限性:还没到能完全放手的时候
/goal 目前仍是实验性功能,有几个值得注意的坑:
1. 仅限 CLI:Codex 桌面应用暂不支持。
2. API 配额耗尽时的死循环 Bug:当 API 配额用完后,/goal 会陷入一个尴尬的循环——不断发请求、不断收到配额耗尽错误、然后继续重试。社区戏称为「Ralph Loop of Errors」。当 Agent 没有自知之明时,「努力」就变成了空转。
3. Plan 模式互斥:Plan 模式下目标系统被自动忽略,两种模式不能同时用。
4. 过早关闭问题:模型有时候因为产出了某个产物就宣布目标完成,实际只完成了表面工作。这不是技术 bug,这是大模型 RLHF 训练的副作用——模型被训练成讨好用户,而「任务完成」是最大的讨好。要修复这个问题,可能需要从训练范式层面动刀。
顺便提一句,这个功能的开发者是 Eric Traut——就是 Python 类型检查器 Pyright 的作者。从帮人类写更好的代码(类型检查),到让 AI 替人类写代码(Agent 循环),他的职业轨迹本身就是一个时代隐喻。
从 How 到 What:人与 AI 协作方式的范式转变
/goal 代码量不大、概念不复杂,但它改变的是人与 AI 的协作界面——从「你说一句我做一步」变成「你定目标我全程负责」,从对话变成委托。
引用 Karpathy 的 Software 3.0 概念来看,三代软件的演进主线其实是人类参与方式的变化:
| 阶段 | 人类做什么 | 核心动作 |
|---|---|---|
| Software 1.0 | 告诉机器怎么做 | How |
| Software 2.0 | 给机器看该怎么做 | Show |
| Software 3.0 | 告诉机器你要什么 | What |
传统软件自动化你能规格化的东西,AI 自动化你能验证的东西。
这就像导航 APP 和手绘地图的区别。手绘地图时代,你得自己规划路线、记住每个路口;导航时代,你只需要输入目的地。/goal 就是编程领域的「输入目的地」。
但导航的类比有一个致命盲区——导航的目的地是明确的(一个地址),而软件开发的「目标」往往是模糊的、矛盾的、随时变化的。真正的难题从来不是「让 Agent 跑到终点」,而是「定义终点在哪」。
用户体验、代码优雅度、架构的长期可维护性,这些「软目标」才是软件工程的灵魂。/goal 能跑通测试,但能跑通代码审美吗?这个问题的答案,决定了程序员这个职业是消亡还是进化。
写在最后
作为一个已经在实践中基本不动手写代码的开发者,我越来越觉得自己的精力花在两件事上:定义目标和验证目标是否真正完成。
当 Agent 能管理自己的进度并达成目标,人类唯一需要做好的事就是——想清楚自己到底要什么。
AI Agent 的终极讽刺在于:它越能自主达成目标,就越暴露出人类最稀缺的能力不是执行力,而是定义力——知道自己真正想要什么,从来都是最难的工程。
相关推荐
 深度解读
深度解读OpenClaw开源小龙虾AI Agent运作原理深度解析
深度解析OpenClaw(开源小龙虾)AI Agent的底层运作原理,涵盖System Prompt、工具调用、SubAgent分身、Skill系统、记忆机制与Context Engineering等核心概念,帮你彻底理解AI Agent与普通语言模型的本质区别。
 深度解读
深度解读Transformer本质解析:一个被拆解的文字接龙函数
用文字接龙的视角理解Transformer本质。将复杂的语言生成任务拆解为Embedding、Transformer Block、概率输出三大模块,帮助深度学习初学者快速建立直觉。
 深度解读
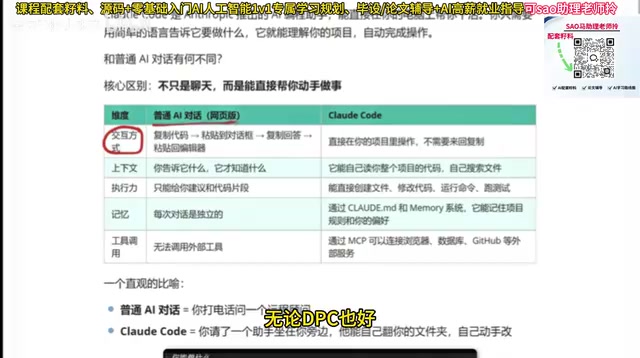
深度解读Claude Code与普通AI对话的五大核心差异
详细对比Claude Code与普通AI对话工具在交互方式、上下文理解、执行力、记忆能力和工具调用五个维度的核心差异,帮你理解AI编程助手的真正价值。