Gemini 3.5 Flash Teams Up with Antigravity: Multi-Agent Collaboration to Build an Entire City

Gemini 3.5 Flash orchestrates multiple AI subagents via Antigravity to build an entire virtual city from scratch.
Google's Gemini 3.5 Flash model, combined with the Antigravity execution platform, demonstrates how multi-subagent architecture can autonomously design and build a complete virtual city. The orchestrator model decomposes the complex task into subtasks—layout planning, building design, infrastructure, and coordination—delegating each to specialized subagents. This showcases a new paradigm where lightweight models can drive sophisticated multi-agent workflows at lower cost, marking AI's evolution from conversation to complex creation.
A New Paradigm for Multi-Agent AI Collaboration
The combination of Google's newly released Gemini 3.5 Flash model with the Antigravity platform showcases a remarkable capability demonstration: deploying multiple subagents to design and build a complete virtual city from scratch. This case not only demonstrates Gemini 3.5 Flash's powerful reasoning and task decomposition capabilities but also reveals that multi-agent collaboration is moving toward practical application.

What Is Multi-Subagent Architecture?
In traditional AI applications, a single model typically handles all tasks. Multi-subagent architecture takes a fundamentally different approach: an orchestrator agent understands the overall objective, then breaks complex tasks into multiple subtasks, delegating them to different subagents for parallel or sequential execution.
The concept of Multi-Agent Systems (MAS) can be traced back to distributed artificial intelligence research in the 1980s, but it truly came alive in the large language model era after 2023. Its core philosophy draws from microservice architecture in software engineering and the division-of-labor model in human organizations. In LLM-driven multi-agent systems, each agent is essentially a model instance with a specific system prompt, toolset, and memory mechanism. The orchestrator typically employs reasoning frameworks like ReAct (Reasoning + Acting) or Plan-and-Execute for task decomposition, communicating with subagents through function calling or structured outputs. The advantage of this architecture is that each subagent can have a specifically optimized context window and tool permissions, avoiding the performance degradation that occurs when a single model processes extremely long contexts.
In this demonstration, Gemini 3.5 Flash served as the core orchestrator. Facing a highly complex task like "build a city," the model needed to:
- Plan the overall city layout: road networks, functional zoning, terrain adaptation
- Design individual buildings: different building types (residential, commercial, public facilities)
- Handle infrastructure: transportation systems, green belts, public spaces
- Coordinate subsystems: ensure spatial and logical consistency across all components
Each dimension can be handled by a specialized subagent, with the orchestrator integrating the final output.
The Role of the Antigravity Platform
Antigravity, as a collaboration platform, provides Gemini 3.5 Flash with an execution environment and toolchain. It enables the AI model to go beyond merely "generating text descriptions" and actually invoke tools, manipulate interfaces, and generate visualized 3D city models.
Antigravity belongs to the emerging category of Agent Execution Platforms, whose core value lies in providing AI models with the "hands and feet" to interact with the digital world. Traditional LLMs can only generate text output, but execution platforms provide API calls, code execution sandboxes, GUI manipulation capabilities, file system access, and other toolchains that transform model reasoning results into actual operations. In the 3D city generation scenario, the platform needs to provide procedural modeling interfaces, spatial coordinate systems, material libraries, and rendering pipelines—all far beyond the capabilities of pure text models. Similar platforms include Replit Agent, Devin (in software development), and various RPA (Robotic Process Automation) integration solutions.
This model capability + execution platform combination is becoming the mainstream paradigm for AI application deployment. The model handles thinking and decision-making, the platform handles execution and rendering, each fulfilling its role to collaboratively accomplish tasks far beyond the capability boundaries of any single system.
Why This Demo Deserves Attention
Automatic Decomposition of Complex Tasks
"Build a city" is an extremely open-ended and complex task. The model needs to autonomously determine which subagents to create, how to allocate responsibilities, and in what order to execute. This demonstrates Gemini 3.5 Flash's maturity in task planning.
Task planning is one of the core challenges in AI agent research, involving the decomposition of vague high-level goals into specific executable step sequences. In classical AI, this belongs to the Automated Planning domain, using formal languages like STRIPS and PDDL to describe state spaces. In the LLM era, task planning relies more on the model's world knowledge and reasoning capabilities, implemented through techniques like Chain-of-Thought and Tree-of-Thought. The difficulty of open-ended tasks like "build a city" lies in the absence of a predefined subtask list—the model must independently determine which components are needed, their dependencies, and a reasonable execution order based on its understanding of urban planning domain knowledge. The emergence of this capability marks a qualitative shift of LLMs from "tool users" to "workflow designers."
Performance Breakthrough at the Flash Level
Gemini 3.5 Flash is positioned as a lightweight, high-speed reasoning model. Achieving multi-agent orchestration at the Flash level means that complex agent workflows no longer require the most powerful (and most expensive) models, lowering the deployment barrier for multi-agent systems.
Within Google's Gemini model family, the Flash series represents the direction of speed and cost optimization, complementing the Pro series (which pursues maximum capability). Flash models typically employ smaller parameter scales or more aggressive inference optimization techniques (such as speculative decoding, model distillation, etc.), dramatically reducing latency and computational costs while maintaining core reasoning capabilities. The fact that Gemini 3.5 Flash can handle multi-agent orchestration tasks indicates that its function calling accuracy, long-chain reasoning stability, and instruction-following capabilities have reached practical thresholds. This is significant for the industry: the orchestrator in multi-agent systems needs to perform frequent reasoning and dispatching, and if each call requires the most expensive model, system operating costs would grow exponentially.
The Leap from Conversation to Creation
This demonstration marks AI's transition from "answering questions" to "creating complex artifacts." City design involves the comprehensive application of multi-dimensional capabilities including spatial reasoning, aesthetic judgment, and functional planning—far exceeding the traditional application scope of language models.
Industry Trends in Multi-Agent Collaboration
Recently, multi-agent systems have become one of the hottest research and application directions in AI. From OpenAI's Swarm framework to Google's Agent Space, from Microsoft's AutoGen to various open-source solutions, tech giants and developer communities are actively exploring how to make multiple AI agents collaborate efficiently.
Current mainstream multi-agent frameworks each have their focus: OpenAI's Swarm is a lightweight educational framework emphasizing the "handoff" pattern between agents, suitable for understanding the basic principles of multi-agent collaboration; Microsoft's AutoGen supports complex conversation topologies and human-in-the-loop cycles, excelling in enterprise applications; LangChain's LangGraph provides state-graph-based agent orchestration capabilities, suitable for scenarios requiring precise flow control; CrewAI simulates human team role-division patterns, lowering the cognitive barrier for developers. Google's Agent Space (now part of Vertex AI Agent Builder) deeply integrates with the Google Cloud ecosystem. Common challenges across these frameworks include: balancing information sharing and isolation between agents, controlling error propagation, and overall system observability and debugging capabilities.
This collaboration demo between Gemini 3.5 Flash and Antigravity provides us with a concrete and vivid case: when a model possesses sufficient reasoning capability, paired with an appropriate execution platform, AI can autonomously organize teams to accomplish creative and complex engineering tasks.
This perhaps foreshadows the future form of AI applications—no longer a solo performance by a single model, but "virtual teams" autonomously assembled by AI working collaboratively to complete complex tasks ranging from urban planning to software development, from scientific research to creative design.
Key Takeaways
Related articles
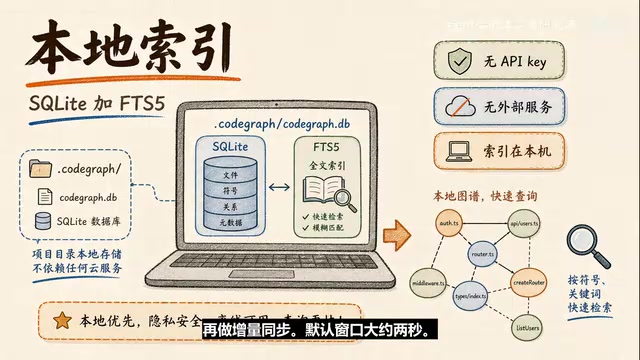
CodeGraph: Give Your Coding Agent a Code Map, Save 47% Tokens
CodeGraph is an open-source project with ~40K GitHub stars that uses Tree-sitter to build a local queryable code map, helping Claude Code and Cursor reduce 47% token usage and 58% tool calls.
AI Finishes Writing Code, Automatically Strikes a Gong to Alert You: Open-Source Physical Feedback Tool DAgent
A developer built a physical feedback device with chopsticks and a small gong that auto-strikes when AI finishes coding. Now open-sourced as DAgent, it also simulates IPO bell-ringing when creating new files.

Level Up Claude Code: Building an Enhanced Plan Mode with Grill Me
Learn how to install and use the Grill Me Skill for Claude Code, replacing AI guesswork with structured questioning to clarify requirements before generating execution plans.